07. Odometry to Trajectory Package
Odometry To Trajectory Package
Install the package:
$ cd /home/workspace/catkin_ws/src
$ git clone https://github.com/udacity/odom_to_trajectoryBuild the package:
$ cd /home/workspace/catkin_ws
$ catkin_make
$ source devel/setup.bashLaunch the nodes:
$ roslaunch odom_to_trajectory create_trajectory.launch 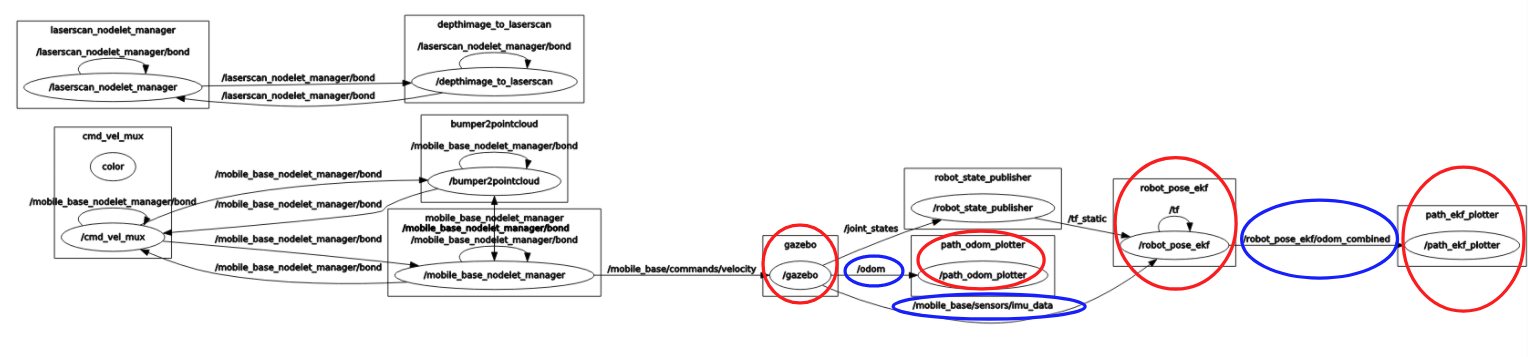
click to expand
Now that you’ve launched the nodes, open a new terminal and run the
rqt graph
. In the active nodes and topics, you’ll now see the estimated
3D pose
since one of the nodes in the
odom to trajectory
package is subscribing to it. You’ll also notice that the
trajectories
are still invisible since we are not yet subscribed to them!
Visualize the topics:
$ rosrun rqt_graph rqt_graph